¿Qué es el momento de inercia?
El momento de inercia de un cuerpo rígido respecto a cierto eje de rotación es su resistencia a cambiar su velocidad angular alrededor de dicho eje. Es proporcional a la masa y también a la ubicación del eje de giro, ya que el cuerpo, según su geometría, puede rotar más fácilmente en torno a ciertos ejes que en otros.
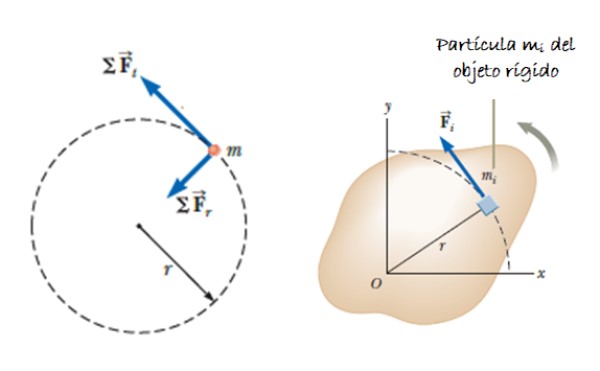
Supongamos un objeto extenso (que consta de muchas partículas), que puede rotar alrededor de un eje. Supongamos que actúa una fuerza F, aplicada tangencialmente sobre el elemento de masa Δmi, que produce un torque o momento, dado por τneto = ∑ri x Fi. El vector ri es la posición de Δmi (ver figura 2).
Dicho momento es perpendicular al plano de rotación (dirección +k = saliendo del papel). Ya que la fuerza y el vector posición radial siempre son perpendiculares, el producto cruz queda:
τneto = ∑ Fi ri k = ∑ (Δmi ai) ri k = ∑ Δmi (ai ri ) k
La aceleración ai representa la componente tangencial de la aceleración, ya que la aceleración radial no contribuye al torque. En función de la aceleración angular α, podemos indicar que:
ai = α ri
Por lo tanto, el torque neto queda así:
τneto = ∑ Δmi (α ri2) k = (∑ ri2 Δmi)α k
La aceleración angular α es la misma para todo el objeto, por lo tanto, no está afectada por el subíndice “i” y puede salir de la sumatoria, la cual es precisamente el momento de inercia del objeto simbolizado con la letra I:
I = ∑ ri2 Δmi
Este es el momento de inercia de una distribución de masa discreta. Cuando la distribución es continua, la sumatoria se reemplaza con una integral y Δm se convierte en un diferencial de masa dm. La integral se efectúa sobre todo el objeto:
I = ∫M(r2)dm
Las unidades del momento de inercia en el Sistema Internacional SI son kg x m2. Se trata de una cantidad escalar y positiva, ya que es el producto de una masa por el cuadrado de una distancia.
Ejemplos de cálculo del momento de inercia
Un objeto extendido, como una barra, disco, esfera u otro, cuya densidad ρ es constante y sabiendo que la densidad es el cociente masa – volumen, el diferencial de masa dm se escribe como:
ρ = dm/dV → dm = ρdV
Sustituyendo en la integral para el momento de inercia, tenemos:
I = ∫r2 ρdV = ρ ∫r2dV
Esta es una expresión general, válida para un objeto tridimensional, cuyos volumen V y posición r son funciones de las coordenadas espaciales x, y y z. Nótese que, al ser constante, la densidad queda fuera de la integral.
La densidad ρ se conoce también como densidad volumétrica, pero si el objeto es muy plano, como una lámina, o muy delgado y estrecho como una varilla, se pueden utilizar otras formas de densidad, veamos:
– Para una lámina muy fina, la densidad a utilizar es σ, la densidad superficial (masa por unidad de área), y dA es el diferencial de área.
– Y si se trata de una barra delgada, donde solamente la longitud es relevante, se utiliza la densidad lineal de masa λ y un diferencial de longitud, según el eje utilizado como referencia.
En los ejemplos que siguen se considera que todos los objetos son rígidos (no deformables) y tienen densidad uniforme.
Momento de inercia de una barra delgada respecto a un eje que pasa por su centro
Aquí vamos a calcular el momento de inercia de una barra delgada, rígida, homogénea, de longitud L y masa M, respecto a un eje que pasa por el medio.
En primer lugar, es preciso establecer un sistema de coordenadas y construir una figura con la geometría adecuada, como esta:
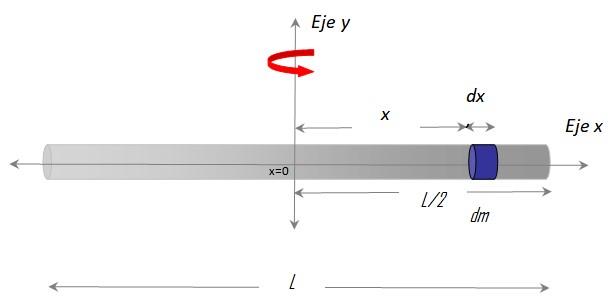
Se escogió el eje x a lo largo de la barra y el eje y como eje de rotación. El procedimiento para establecer la integral requiere también elegir un diferencial de masa sobre la barra, llamado dm, el cual tiene una longitud diferencial dx y se localiza en la posición x arbitraria, respecto al centro x=0.
De acuerdo a la definición de densidad de masa lineal λ:
λ = M/L
Al ser uniforme la densidad, lo que es válido para M y L, también lo es para dm y dx:
λ = dm/dx → dm = λdx.
Por otro lado, el elemento de masa está en la posición x, entonces al sustituir esta geometría en la definición, tenemos una integral definida, cuyos límites son los extremos de la barra según el sistema coordenado:
Sustituyendo la densidad lineal λ=M/L:
Para hallar el momento de inercia de la barra respecto a otro eje de rotación, por ejemplo uno que pase por uno de sus extremos, se puede utilizar el teorema de Steiner (ver ejercicio resuelto al final) o bien efectuar un cálculo directo semejante al mostrado aquí, pero modificando adecuadamente la geometría.
Momento de inercia de un disco respecto a un eje que pasa por su centro
Un disco muy delgado, de espesor despreciable, es una figura plana. Si la masa está distribuida uniformemente por toda la superficie de área A, la densidad de masa σ es:
σ = M/A
Tanto dm como dA corresponden a la masa y al área del anillo diferencial mostrado en la figura. Supondremos que todo el conjunto gira alrededor del eje y.
Se puede imaginar que el disco está compuesto por muchos anillos concéntricos de radio r, cada uno con su respectivo momento de inercia. Sumando las contribuciones de todos los anillos hasta llegar al de radio R, se tendrá el momento de inercia total del disco.
σ =dm/dA→ dm = σdA
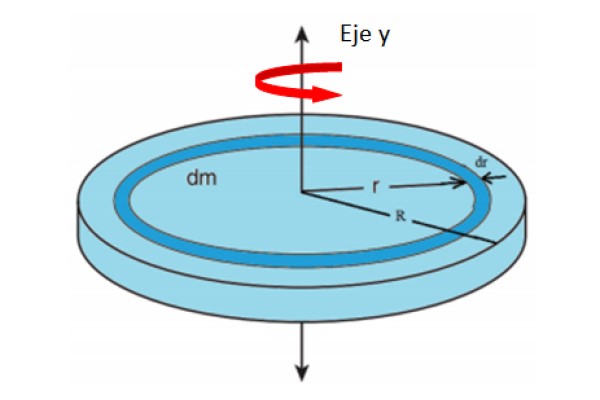
Donde M representa la totalidad de la masa del disco. El área de un disco depende de su radio r como:
A = π.r2
Derivando respecto a r:
dA /dr = 2= 2π.r → dA = 2π.rdr
Sustituyendo lo anterior en la definición de I:
Luego de evaluar la integral resulta:
Sustituyendo σ = M/(π.R2 ) queda:
Momento de inercia de una esfera sólida respecto a un diámetro
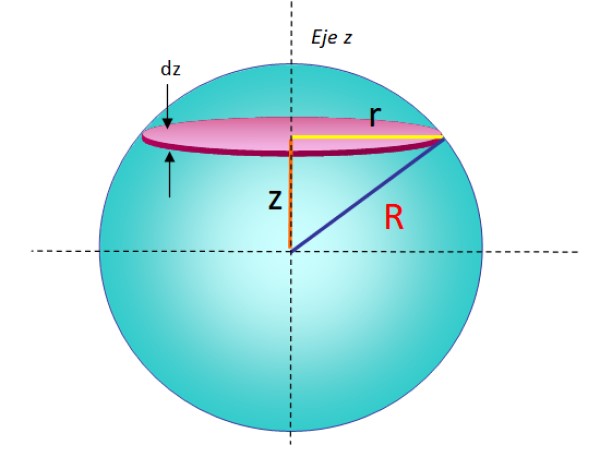
Una esfera de radio R puede considerarse como una serie de discos apilados uno encima de otro, donde cada disco de masa infinitesimal dm, radio r y espesor dz, tiene un momento de inercia dado por:
dIdisco = (½) r2dm
Para encontrar este diferencial, simplemente se tomó la fórmula de la sección anterior y se sustituyeron M y R por dm y r, respectivamente. Un disco como este se aprecia en la geometría de la figura 5.
Al sumar todos los momentos de inercia infinitesimales de discos apilados, se obtiene el momento de inercia total de la esfera:
Iesfera = ∫dIdisco
Lo cual equivale a:
I = ∫esfera (½) r2dm
Para resolver la integral se necesita expresar dm apropiadamente. Como siempre, se logra a partir de la densidad:
ρ = M/V = dm/dV → dm = ρ.dV
El volumen de un disco diferencial es:
dV = Área de la base x altura
La altura del disco es el espesor dz, mientras que el área de la base es πr2, por lo tanto:
dV = πr2dz
Y sustituyendo en la integral planteada quedaría así:
I = ∫esfera(½) r2dm = ∫(½) r2(ρπr2dz)
Pero antes de integrar, hay que observar que r –el radio del disco– depende de z y R –el radio de la esfera–, como se ve en la figura 5. Mediante el teorema de Pitágoras:
R2 = r2 + z2 → r2 = R2 – z2
Que nos lleva a:
I = ∫esfera(½)ρ r2(πr2dz)= ∫esfera(½)ρ π r4dz= ∫esfera(½)ρ π (R2 – z2)2 dz
Para integrar sobre toda la esfera, notamos que z varía entre –R y R, por lo tanto:
Sabiendo que ρ = M/V = M /[(4/3)πR3] finalmente se obtiene, luego de simplificar:
Momento de inercia de un cilindro sólido respecto al eje axial
Para este objeto se utiliza un método parecido al que se usó para la esfera, solo que esta vez es más sencillo si el cilindro se imagina formado por cascarones cilíndricos de radio r, espesor dr y altura H, como si fueran las capas de una cebolla.
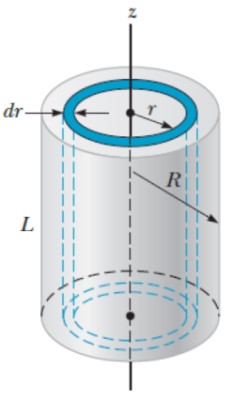
El volumen dV de una capa cilíndrica es:
dV = 2π.rL.dr
Por lo tanto, la masa del cascarón es:
dm = ρ.dV= ρ. 2π.r.L.dr
Se sustituye esta expresión en la definición de momento de inercia:
Ya que ρ = M / (π.R2L) queda:
La ecuación anterior señala que el momento de inercia del cilindro no depende de su longitud, sino de su masa y de su radio solamente. Si L cambiase, el momento de inercia respecto al eje axial seguiría siendo el mismo. Por esta razón, I del cilindro coincide con el del disco delgado previamente calculado.
Momento de inercia de una lámina rectangular respecto a un eje que pasa por su centro
Se ha escogido al eje y horizontal como eje de rotación. La figura a continuación muestra la geometría necesaria para llevar a cabo la integración:
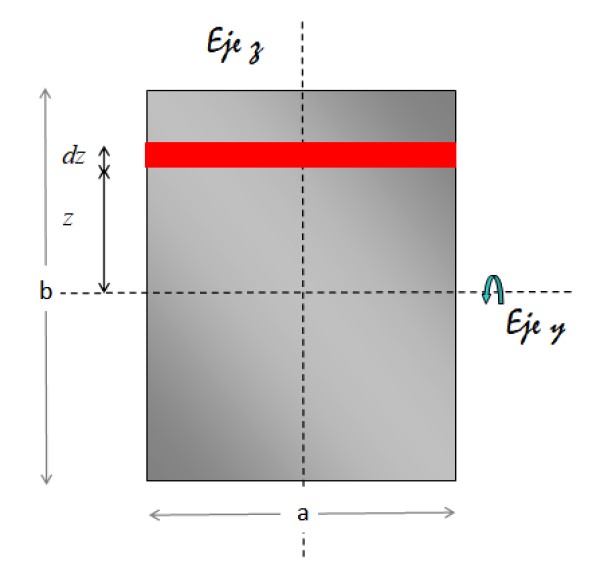
El elemento de área señalado en rojo es rectangular. Su área es base x altura, por lo tanto:
dA = a.dz
Por lo tanto, el diferencial de masa es:
dm = σ.dA = σ.(a.dz)
En cuanto a la distancia del elemento de área al eje de rotación, siempre es z. Sustituimos todo esto en la integral del momento de inercia:
Ahora se sustituye la densidad de masa superficial σ por:
σ = M/ab
Y definitivamente queda así:
Nótese que es como el de la barra delgada.
Momento de inercia de una lámina cuadrada respecto a un eje que pasa por su centro
Para un cuadrado de lado L, en la expresión anterior válida para un rectángulo, simplemente se sustituye el valor de b por el de L:
Teoremas del momento de inercia
Hay dos teoremas especialmente útiles para simplificar el cálculo de momentos de inercia respecto a otros ejes, que de otra manera podrían resultar complicados de hallar por la falta de simetría. Estos teoremas son:
Teorema de Steiner
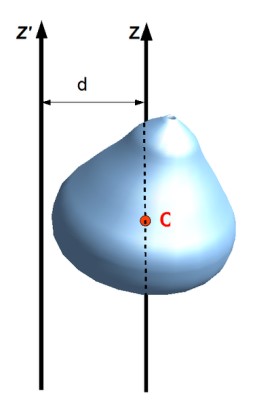
Llamado también teorema de los ejes paralelos, relaciona el momento de inercia respecto a un eje con otro que pase por el centro de masa del objeto, siempre y cuando los ejes sean paralelos. Para aplicarlo, se necesita conocer la distancia D entre ambos ejes y, desde luego, la masa M del objeto.
Sea Iz el momento de inercia de un objeto extendido respecto al eje z, ICM el momento de inercia respecto a un eje que pasa por el centro de masas (CM) de dicho objeto, entonces se cumple que:
Iz = ICM + MD2
O en la notación de la siguiente figura: Iz’ = Iz + Md2
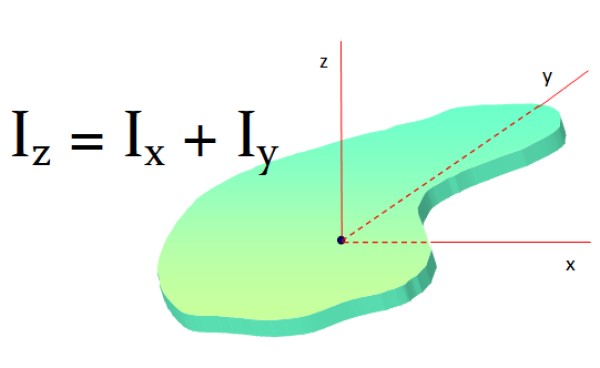
Teorema de los ejes perpendiculares
Este teorema se aplica a superficies planas y dice así: el momento de inercia de un objeto plano alrededor de un eje perpendicular a él, es la suma de los momentos de inercia alrededor de dos ejes perpendiculares al primer eje:
Iz = Ix + Iy
Si el objeto posee simetría tal que Ix e Iy son iguales, entonces se cumple que:
Iz = 2Ix
Ejercicio resuelto
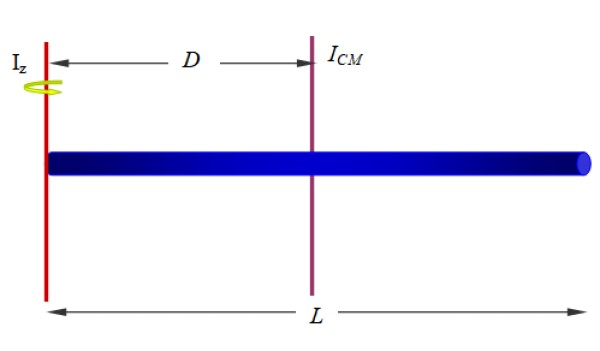
Hallar el momento de inercia de la barra respecto a un eje que pasa por uno de sus extremos, como la mostrada en la figura 1 (abajo y a la derecha) y la figura 10.
Solución:
Ya tenemos el momento de inercia de la barra alrededor de un eje que pasa por su centro geométrico. Puesto que la barra es homogénea, su centro de masa se encuentra en dicho punto; entonces este será nuestro ICM para aplicar el teorema de Steiner.
Si la longitud de la barra es L, el eje z está a una distancia D = L/2, por lo tanto:
Iz = ICM + MD2= (1/12)ML2+M(L/2)2=(1/3)ML2
Referencias
- Bauer, W. Física para Ingeniería y Ciencias. Volumen 1. McGraw-Hill.
- Rex, A. Fundamentos de Física. Pearson.
- Parallel Axis Theorem. Recuperado de hyperphysics.phy-astr.gsu.edu.
- Momento de inercia de sólidos esféricos. Recuperado de laplace.us.es.
- Parallel axis theorem. Recuperado de en.wikipedia.org.